 Creare un blog oggi è semplicissimo grazie alle numerose piattaforme cms editoriali. Queste permettono di creare il proprio blog personalizzato e aggiornabile in pochissimo tempo. Senza nessuna particolare conoscenza informatica.
Creare un blog oggi è semplicissimo grazie alle numerose piattaforme cms editoriali. Queste permettono di creare il proprio blog personalizzato e aggiornabile in pochissimo tempo. Senza nessuna particolare conoscenza informatica.
Questi Content Management Sistem. Ovvero Sistemi di gestione del contenuto. Infatti sono in grado di creare blog e pagine web, definendone stile, alberatura, lingua e altro. In questo modo si consente una gestione dei contenuti editoriali anche chi non ha molte competenze informatiche.
Esistono moltissime piattaforme cms per blog. Molte delle quali prevedono anche numerose app. Esse permettono di integrare nuove funzionalità alla semplice gestione dei contenuti. Come per esempio la creazione di form per contatti o slideshow particolari.
E’ necessario fare una distinzione fra i cms per blog che usano un linguaggio PHP. Quindi adatti ad hosting su linux e quelli che utilizzano il linguaggio asp.net e che quindi funzionano su sistemi windows, entrambe le tipologie sono ugualmente affidabili.
Di seguito potete trovare un elenco dei più famosi cms editoriali suddivisi per linguaggio utilizzato. Così potrai prendere in considerazione quello più adatto alle tue esigenze per creare il tuo blog o sito internet in modo facile, veloce e personalizzato:
PHP su Linux
- Joomla!: è considerato dagli esperti uno dei migliori cms opensource in circolazione. Ma il suo utilizzo non è fra i più semplici e richiede qualche competenza in più. Esso è dotato di notevoli componenti che permettono di aggiungere tantissime funzionalità differenti.

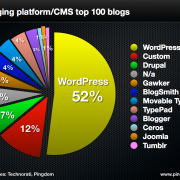
- WordPress: è sicuramente la più famosa e fra le più diffuse piattaforme di personal publishing e cms editoriale. Consente la creazione di blog o siti internet facilmente aggiornabili.
- Drupal: è un cms editoriale, non studiato appositamente per il blogging, può risultare quasi banale, per la semplicità di gestione dei contenuti e delle categorie ed è sostenuto da una community ampia e attiva.
- Nucleus CMS: è un cms editoriale opensource che consente di creare diversi blog contemporaneamente, è facile e intuitivo e permette di modificare fogli di stile, lingua e altro.

ASP.NET su Windows
- DNN (DotNetNuke): uno dei più famosi cms editoriali, è possibile scaricare dal sito una versione di prova e la licenza è gratuita, il produttore richiede solamente la presenza di un link che rimandi al proprio sito. DNN permette di personalizzare la grafica e di gestire i contenuti in modo facile e intuitivo, adatto sia a sviluppatori esperti che a principianti.
- Kentico: questo cms editoriale ha vinto il premio 2013 come miglior cms nella categoria DevPro Community Choice Awards, è un sistema integrato per la gestione di contenuti, per l’e-commerce, social networking, intranet e online marketing.
- Monox: è una piattaforma opensource, che permette la creazione e gestione di contenuti testuali e per social network, è facile, versatile e flessibile.
- Umbraco: è uno dei cms più diffusi in ambito asp, permette di gestire in modo facile e veloce i contenuti testuali tramite un interfacci utente intuitiva e chiara, gli eventuali errori di compilazione sono segnalati da una finestra apposita, dispone inoltre di numerose integrazioni gratuite.
Orientarsi nel panorama dei cms editoriali può rappresentare un’impresa ardua, è necessario valutare attentamente le diverse possibilità e funzionalità che le varie piattaforme mettono a disposizioni, ponendo anche particolare attenzione ai costi, non tutti i moduli aggiuntivi sono infatti gratuiti. Noi vi abbiamo segnalato i sistemi di gestione dei contenuti più importanti e affidabili e allo stesso tempo facili da usare anche per i meno esperti del web.

